During 2017 summer break, I tried to find a way to connect Sony DualShock 4 Controller to EV3. However there was not so much information online, finally I figured it out by my own and the PS4 controller now can be fully programmed.
Requirements
- Download ev3dev
- Read python-ev3dev API
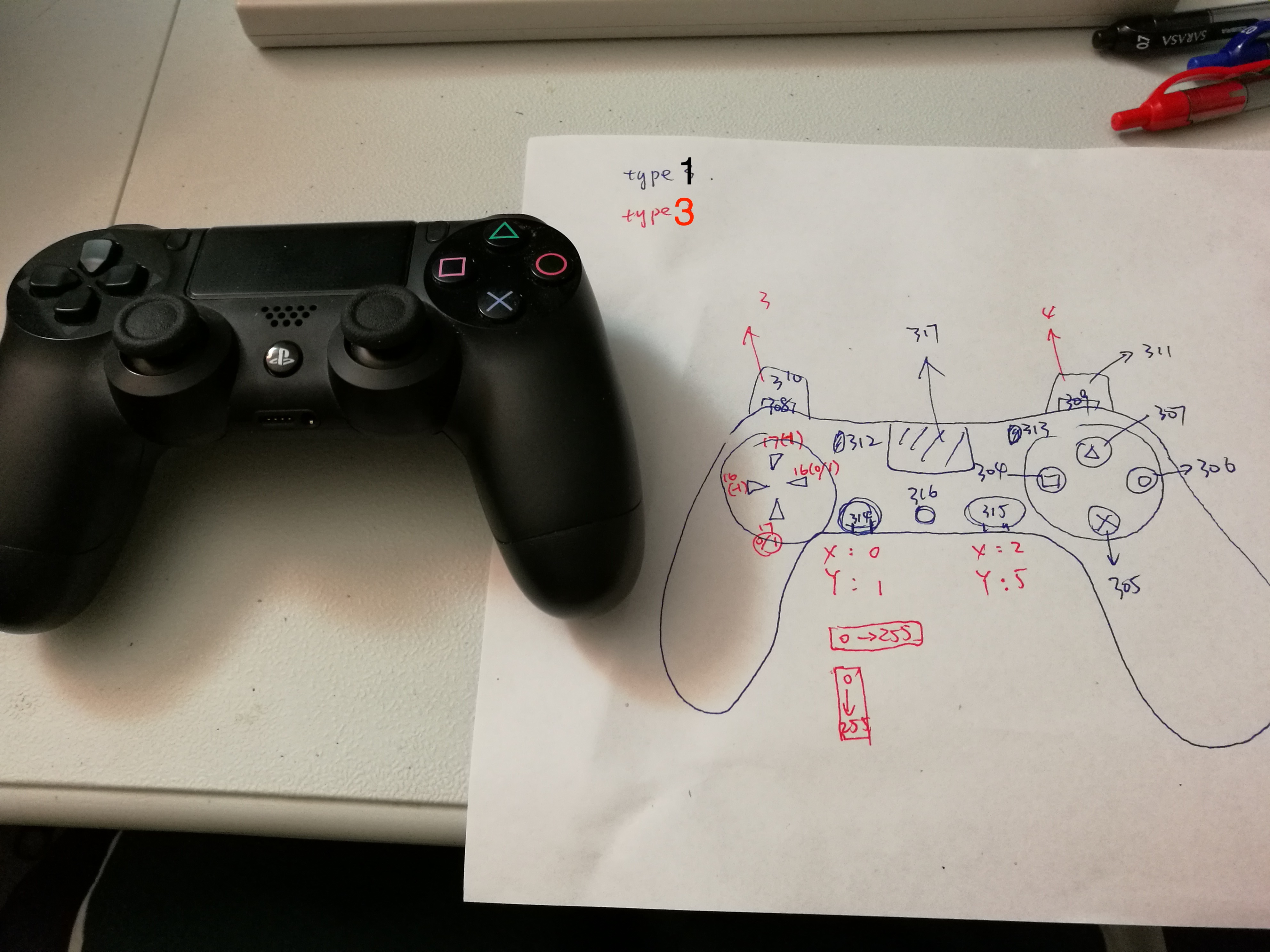
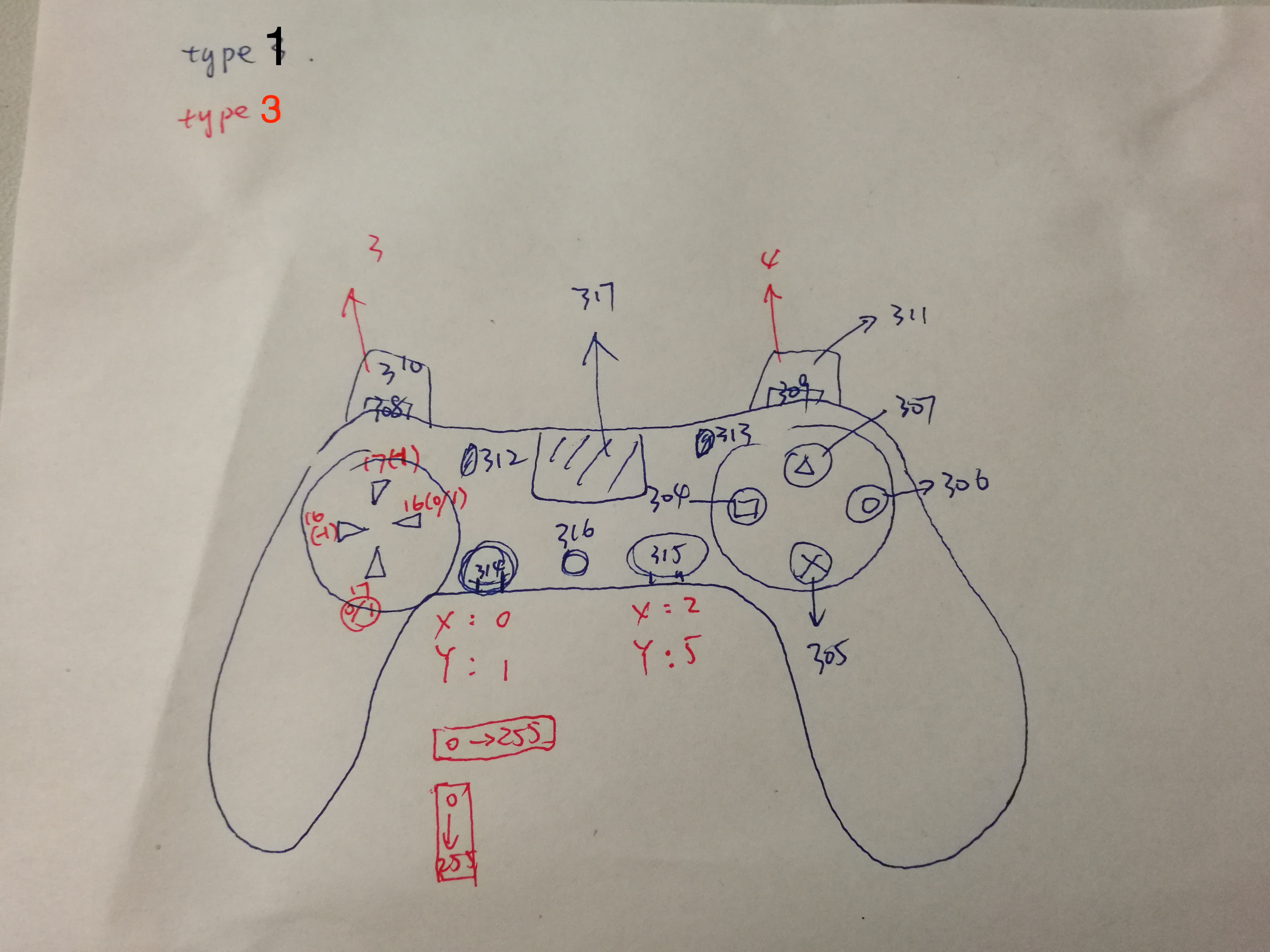
Controller Key Mapping
It took me a while to test the key map. Finally I concluded a full version of key mapping.
Remote Control EV3 LEGO Cart
Video
Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
#!/usr/bin/env python3
__author__ = "bythew3i"
import evdev
import ev3dev.auto as ev3
import threading
def scale(val, src, dst):
return (float(val - src[0]) / (src[1] - src[0])) * (dst[1] - dst[0]) + dst[0]
def scale_stick(value):
return scale(value, (0,255),(-100,100))
# ps4 controller set up
print("Finding ps4 controller...")
devices = [evdev.InputDevice(fn) for fn in evdev.list_devices()]
ps4dev = devices[0].fn
gamepad = evdev.InputDevice(ps4dev)
running = True
# wheel set up
wheel_speed = 0
class MotorThread(threading.Thread):
def __init__(self):
self.motor = ev3.LargeMotor(ev3.OUTPUT_A)
threading.Thread.__init__(self)
def run(self):
print("Wheels Ready...")
while running:
self.motor.run_direct(duty_cycle_sp=wheel_speed)
self.motor.stop()
motor_thread = MotorThread()
motor_thread.setDaemon(True)
motor_thread.start()
# steer set up
steer_speed = 0
class DirectionThread(threading.Thread):
def __init__(self):
self.motor = ev3.MediumMotor(ev3.OUTPUT_D)
threading.Thread.__init__(self)
def run(self):
print("Steer Ready...")
while running:
self.motor.run_direct(duty_cycle_sp=steer_speed)
steer_thread = DirectionThread()
steer_thread.setDaemon(True)
steer_thread.start()
# event listner
for event in gamepad.read_loop(): #this loops infinitely
if event.type == 3: #A stick is moved
if event.code == 5: #Y axis on right stick
wheel_speed = scale_stick(event.value)
if event.code == 0:
steer_speed = scale_stick(event.value)/3.0
if event.type == 1 and event.code == 302 and event.value == 1:
print("X button is pressed. Stopping.")
running = False
break
Voice Control GoPro5 Camera
Video
Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
#!/usr/bin/env python3
__author__ = "bythew3i"
import evdev
import ev3dev.auto as ev3
import threading
import ev3dev.ev3 as brickman
### general classes
class MotorThread(threading.Thread):
def __init__(self, side, out):
self.pause = False
self.speed = 0
self.work = True
self.side = side
self.motor = ev3.LargeMotor(ev3.OUTPUT_A)
if out.upper() == "B":
self.motor = ev3.LargeMotor(ev3.OUTPUT_B)
elif out.upper() == "C":
self.motor = ev3.LargeMotor(ev3.OUTPUT_C)
elif out.upper() == "D":
self.motor = ev3.LargeMotor(ev3.OUTPUT_D)
threading.Thread.__init__(self)
def run(self):
print(self.side, "wheel is ready")
while self.work:
if self.pause:
self.speed = 0
self.motor.run_direct(duty_cycle_sp=self.speed)
self.motor.stop()
### general functions
def scale(val, src, dst):
return (float(val - src[0]) / (src[1] - src[0])) * (dst[1] - dst[0]) + dst[0]
def scale_stick(value):
return scale(value, (0,255), (-100, 100))
def main():
### controller setup
print("Controller Set Up ...")
devices = [evdev.InputDevice(fn) for fn in evdev.list_devices()]
gamepad = evdev.InputDevice(devices[0].fn)
### left motor
l_motor_thread = MotorThread("LEFT", "A")
l_motor_thread.setDaemon(True)
l_motor_thread.start()
### right motor
r_motor_thread = MotorThread("RIGHT", "D")
r_motor_thread.setDaemon(True)
r_motor_thread.start()
### controller listener
sqr_cnt = 0
cir_cnt = 0
gopro_pow = False
sound_config = '-a 300 -s 110'
for event in gamepad.read_loop():
if event.type == 3: # analog
if event.code == 5: # right stick Y
l_motor_thread.speed = -scale_stick(event.value)
r_motor_thread.speed = -scale_stick(event.value)
if event.code == 0: # left stick X
if event.value > 133:
r_motor_thread.pause = True
elif event.value < 122:
l_motor_thread.pause = True
else:
l_motor_thread.pause = False
r_motor_thread.pause = False
if event.type == 1: # key pressed
if event.value == 1:
if event.code == 304: # SQR btn -> gopro photo mode
option = sqr_cnt % 2
if option == 0:
cmd = "go pro photo mode"
elif option == 1:
cmd = "go pro take a photo"
brickman.Sound.speak(cmd, sound_config)
sqr_cnt += 1
elif event.code == 305: # X btn -> turn off go pro
brickman.Sound.speak("Go pro turn off", sound_config)
elif event.code == 306: # O btn -> go pro video mode
option = cir_cnt % 3
if option == 0:
cmd = "go pro video mode"
elif option == 1:
cmd = "go pro start recording"
else:
cmd = "go pro stop recording"
brickman.Sound.speak(cmd, sound_config)
cir_cnt += 1
elif event.code == 307 and gopro_pow == False: # TRI btn -> turn on go pro
gopro_pow = True
pass
elif event.code == 316: # PS btn -> quit the program
print("Quiting ...")
l_motor_thread.work = False
r_motor_thread.work = False
break
if event.value == -1:
if event.code == 16: # left btn
pass
elif event.code == 17: # up btn
pass
main()