In this project, I learned about the popular colorspaces used in Computer Vison and successfully implemented the Kalman Filter Algorithm to predict the movement of object (Pose Prediction).
Environment
- Ubuntu 18.04
- ROS Melodic
- RealSense D435 camera
Requirement
Detecting a Visual Target
First, my main ideas of detecting the color block were coming from these posts:
- Tutorial on Color Spaces in OpenCV
- Color Filtering OpenCV Python Tutorial
- Tutorial on Blob Detection
The input bag (video resource) was provided by professor Marynel VÁZQUEZ
After color filtering, I was able to capture the movement of the blue block.
Kalman Filter: Pose Prediction
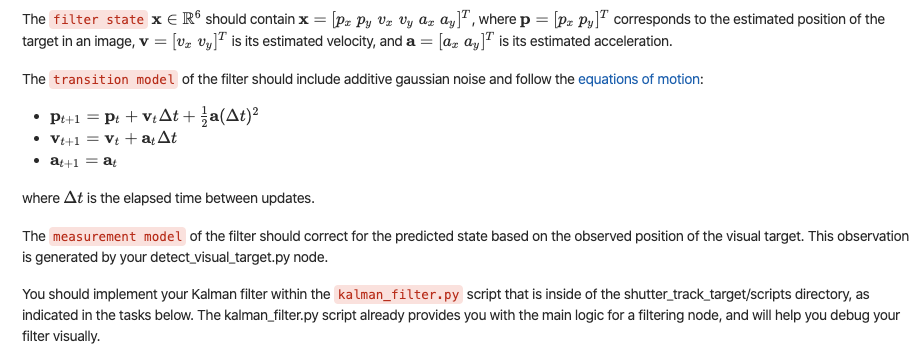
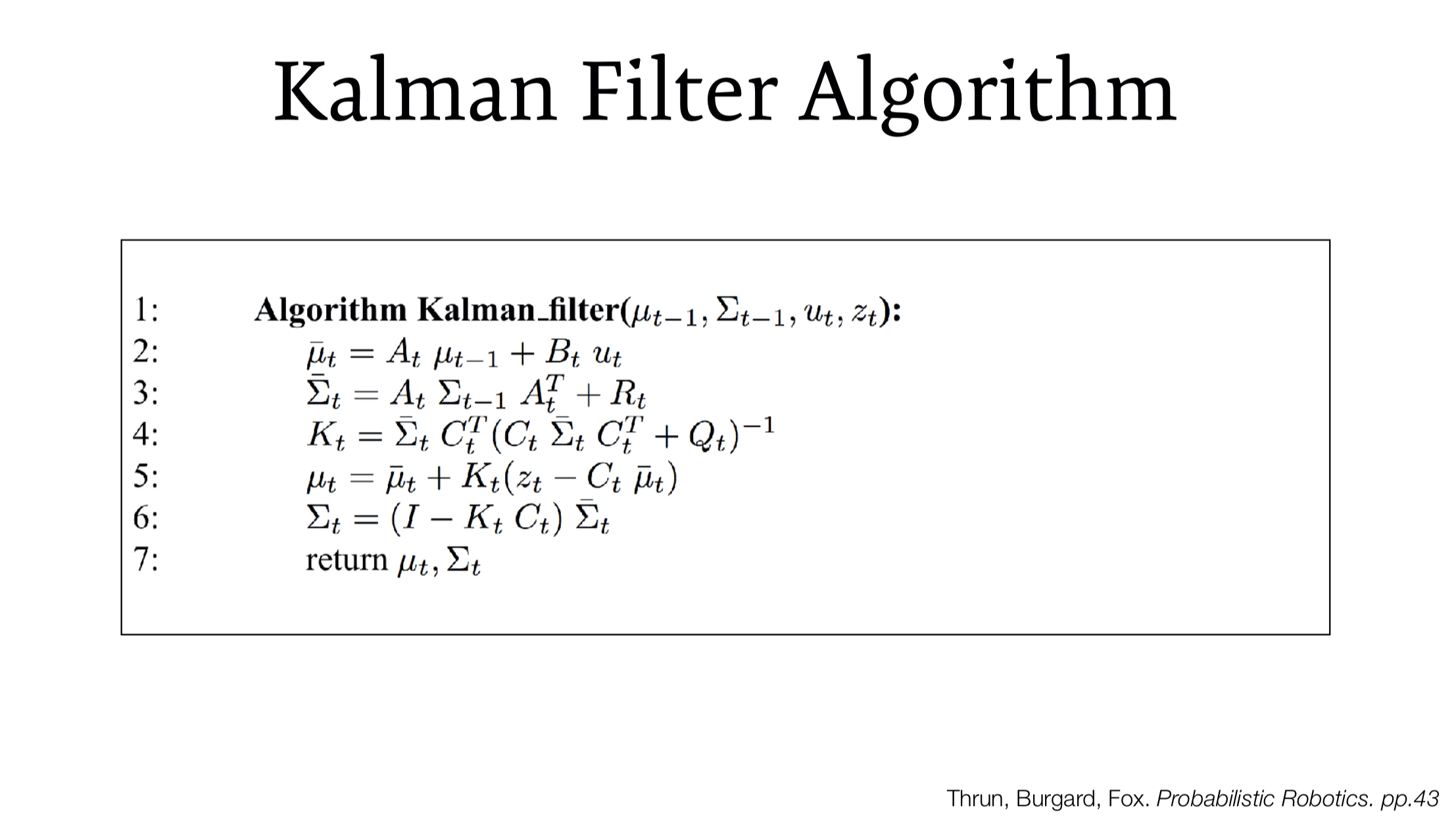
After applying Kalman Filter Algorithm, I got this output:
The images sent over the /tracked_image topic display two trajectories: the
red lineconnects the observed locations for the target (as received through the /observations topic); and thethinner green lineconnects the estimated location for the target (from the Kalman Filter belief).
Real-Time Filtering
Based on the ROS and RealSense D435 camera, I implemented a Yellow block tracking (red line) and Kalman Filter Pose prediction (green line) in real time system.